|
|
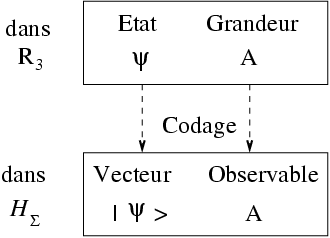
Tout état défini du système est réalisé au moyen d'un appareillage, qui a
pour effet de placer le système dans cet état. Une telle réalisation s'appelle
aussi une préparation. Déplacer l'état du système, par exemple dans
la direction ![]() et d'une distance
et d'une distance ![]() , c'est donc déplacer cet
appareillage dans la direction
, c'est donc déplacer cet
appareillage dans la direction ![]() et d'une distance
et d'une distance ![]() . De
même déplacer une observable, c'est déplacer l'appareillage correspondant
à la mesure de cette observable.
. De
même déplacer une observable, c'est déplacer l'appareillage correspondant
à la mesure de cette observable.
Par exemple, une façon triviale de localiser une particule consiste à
l'enfermer dans le volume ![]() intérieur à une boite de telle sorte que :
intérieur à une boite de telle sorte que :
Déplacer l'état ![]() de cette particule, c'est déplacer cette boite,
qui après déplacement occupera un nouveau volume
de cette particule, c'est déplacer cette boite,
qui après déplacement occupera un nouveau volume ![]() de telle sorte
que l'état déplacé
de telle sorte
que l'état déplacé
![]() sera tel que :
sera tel que :
De même, faire tourner une grandeur physique dans l'espace, par exemple la
composante ![]() du spin d'une particule soit
du spin d'une particule soit ![]() , c'est appliquer cette
même rotation à l'appareillage (un aimant de Stern et Gerlach) qui permet
de mesurer cette grandeur physique. Le nouvel appareillage orienté dans la
nouvelle direction
, c'est appliquer cette
même rotation à l'appareillage (un aimant de Stern et Gerlach) qui permet
de mesurer cette grandeur physique. Le nouvel appareillage orienté dans la
nouvelle direction ![]() mesure la nouvelle grandeur physique
mesure la nouvelle grandeur physique
![]() . On dit que la rotation physique
. On dit que la rotation physique ![]() effectuée dans l'espace
physique
effectuée dans l'espace
physique
![]() et appliquée à l'appareillage, a induit dans l'espace
et appliquée à l'appareillage, a induit dans l'espace
![]() des états une rotation induite
des états une rotation induite
![]() , qui a transformé
l'observable
, qui a transformé
l'observable ![]() en la nouvelle observable
en la nouvelle observable
![]() . La manière dont
. La manière dont
![]() résulte de
résulte de ![]() par action de
par action de
![]() va être
précisée ci-dessous.
va être
précisée ci-dessous.
Toutefois, comment définir le vecteur ket correspondant à
l'état déplacé ? Cet état détermine seulement la
direction de ce ket. Nous précisons cette détermination en
postulant que le ket déplacé
![]() a même longueur
que le ket
a même longueur
que le ket ![]() et donc demeure encore défini à un facteur de
phase près
et donc demeure encore défini à un facteur de
phase près
![]() (
(![]() réel) qui pourrait
dépendre du ket considéré ou même demeurer arbitraire.
Plus généralement, il y a lieu de rappeler ici que tout
opérateur de transformation doit respecter le principe de
superposition des états, et donc :
réel) qui pourrait
dépendre du ket considéré ou même demeurer arbitraire.
Plus généralement, il y a lieu de rappeler ici que tout
opérateur de transformation doit respecter le principe de
superposition des états, et donc :
c'est-à-dire :
Ainsi
![]() est un opérateur linéaire défini à un facteur
de phase près
est un opérateur linéaire défini à un facteur
de phase près
![]() arbitraire, mais constant et indépendant du
vecteur auquel
arbitraire, mais constant et indépendant du
vecteur auquel
![]() est appliqué (changement de jauge global).
est appliqué (changement de jauge global).
La loi de transformation des opérateurs se déduit de celle des vecteurs
kets. En effet, le transformé ![]() d'un opérateur
d'un opérateur ![]() est
défini par :
est
défini par :
et puisque
![]() est
quelconque :
est
quelconque :
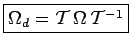 |
Une telle loi de transformation des opérateurs ![]() sous
l'effet de l'opérateur
sous
l'effet de l'opérateur
![]() s'appelle une
transformation de similarité.
s'appelle une
transformation de similarité.