|
|
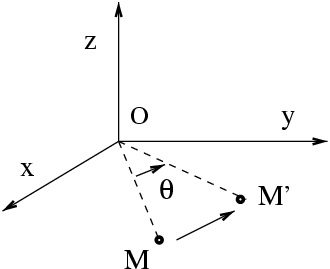
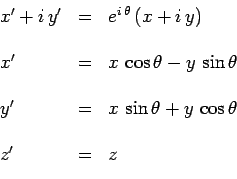
et pour une rotation infinitésimale
![]() :
:
avec :
 |
On obtient des expressions semblables pour des rotations autour des axes ![]() et
et
![]() :
:
 |
et on remarque :
On notera que cette relation n'a aucun caractère quantique. C'est une relation classique concernant les rotations dans l'espace physique à 3 dimensions.
Des rotations infinitésimales, on passe aux rotations finies par itération.
La matrice correspondant à une rotation d'un angle fini ![]() , autour de
l'axe
, autour de
l'axe ![]() s'écrit en effet :
s'écrit en effet :
![$\displaystyle R_z(\theta)=\lim_{n\to\infty}\,\left[R_z(\frac{\theta)}{n})\right]^n=
\lim_{n\to\infty}\,\left(\mathbf{1}-i\,\frac{\theta)}{n}\,\ell_z\right)^n$](img1914.png) |
d'où :
|
|
On notera encore ici que cette expression est parfaitement classique (d'ailleurs
la constante ![]() n'est évidemment pas figurée !).
n'est évidemment pas figurée !).
Considérons en particulier la suite des quatre rotations suivantes :
qui ne produirait aucune rotation résultante si ces rotations
commutaient entre elles. En considérant les angles
![]() et
et ![]() très petits (
très petits (
![]() et
et
![]() ) il va être utile pour la
suite de faire un développement de
) il va être utile pour la
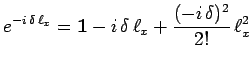
suite de faire un développement de ![]() jusqu'au second ordre, en développant
chaque exponentielle elle-même jusqu'au second ordre, soit par exemple :
jusqu'au second ordre, en développant
chaque exponentielle elle-même jusqu'au second ordre, soit par exemple :
 |
On obtient, alors, tout clacul fait, et en se limitant toujours au second ordre
:
Ainsi au second ordre près, la rotation ![]() considérée est équivalente
à une rotation d'axe
considérée est équivalente
à une rotation d'axe ![]() et d'angle
et d'angle
![]() . Ce résultat va
nous servir ci-après.
. Ce résultat va
nous servir ci-après.