|
|
Si ![]() est le nombre de systèmes placés dans l'état
est le nombre de systèmes placés dans l'état ![]() , on peut dire que chacun de ces
, on peut dire que chacun de ces ![]() systèmes se trouve
distribué dans chacun de ces états et par exemple dans
l'état
systèmes se trouve
distribué dans chacun de ces états et par exemple dans
l'état ![]() avec une probabilité
avec une probabilité
![]() mesurée expérimentalement et déterminée théoriquement :
mesurée expérimentalement et déterminée théoriquement :
 |
L'état de ce système individuel, mais représentatif de l'ensemble, est alors
représenté quantiquement par l'opérateur densité :
 |
Si la mesure constitue également un filtrage, c'est-à-dire élimine certains états,
la somme ne porte plus que sur les états conservés avec
![]() et l'opérateur doit alors être renormalisé de telle sorte que :
et l'opérateur doit alors être renormalisé de telle sorte que :
 |
 |
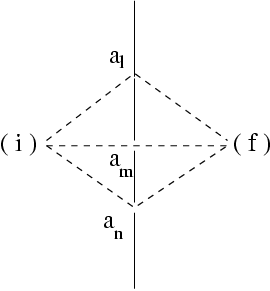
La probabilité de transition de l'état initial dans l'état
mélange est égale à sa probabilité de venir occuper
chaque état ``![]() '' où
'' où
![]() avec la
probabilité
avec la
probabilité
![]() :
:
 |
 |
Bien évidemment, si aucun filtrage n'est réalisé, la
sommation
![]() porte sur toutes les valeurs propres
porte sur toutes les valeurs propres
![]() et
et ![]() . La probabilité
. La probabilité
![]() est égale à 1.
La mesure de
est égale à 1.
La mesure de ![]() a seulement transformé le cas pur
a seulement transformé le cas pur ![]() en un mélange
en un mélange ![]() .
.
Enfin, la probabilité de transition de cet état
mélange vers l'état final :
 |
n'est donc rien d'autre que la probabilité de trouver le mélange
dans l'état ![]() .
.
La probabilité globale de transition
![]() est le produit
des deux probabilités séquentielles précédentes :
est le produit
des deux probabilités séquentielles précédentes :
auxquelles on peut associer deux amplitudes séquentielles :
Toutefois, il est remarquable que la présence de l'opérateur densité dans
chacun des deux facteurs fait que le résultat final n'est pas factorisable :
 |
La probabilité de transition globale est bien alors égale à
la somme des probabilités partielles de transition avec passage
par l'un des états intermédiaires ![]() avec
avec
![]() . On retrouve bien alors la loi classique
d'addition des probabilités. Les voies partielles sont alors
indépendantes et exclusives l'une de l'autre. Les phases
relatives entre les amplitudes partielles
. On retrouve bien alors la loi classique
d'addition des probabilités. Les voies partielles sont alors
indépendantes et exclusives l'une de l'autre. Les phases
relatives entre les amplitudes partielles
![]() peuvent être changées arbitrairement. Elles ne jouent
plus aucun rôle. Les amplitudes partielles n'interfèrent
plus entre elles. La probabilité globale de transition
s'exprime comme une somme de termes au carré et non plus comme
le carré d'une somme.
peuvent être changées arbitrairement. Elles ne jouent
plus aucun rôle. Les amplitudes partielles n'interfèrent
plus entre elles. La probabilité globale de transition
s'exprime comme une somme de termes au carré et non plus comme
le carré d'une somme.